Like any electric motor, a 3-phase induction motor has a stator and rotor. The stator carries a 3-phase winding (called stator winding) while the rotor carries a short circuited winding (called rotor winding). Only the stator winding is fed from 3-phase supply. The rotor winding derives its voltage and power from the externally energized stator winding through electromagnetic induction and hence the name acquired. The induction motor may be considered to be a transformer with a rotating secondary and it can, therefore, be described as a “transformer-type” a.c. machine in which electrical energy is converted into mechanical energy.
What are the advantages and disadvantages of three phase induction motor?
Advantages are:
(i) It has simple and rugged construction.
(ii) It is relatively cheap.
(iii) It requires little maintenance.
(iv) It has high efficiency and reasonably good power factor.
(v) It has self-starting torque.
Disadvantages are:
(i) It is essentially a constant speed motor and its speed cannot be changed easily.
(ii) Its starting torque is inferior to d.c. shunt motor.
Describe the construction of a three phase motor?
A 3-phase induction motor has two main parts (i) stator and (ii) rotor. The rotor is separated from the stator by a small air-gap which ranges from 0.4 mm to 4 mm, depending on the power of the motor.
in the stator slots and are suitably connected to form a balanced 3-phase star or delta connected circuit. The 3-phase WINDING stator winding is wound for a definite number of poles as per requirement of speed.
What is the effect of no. of poles on speed of motor?
Greater the number of poles, lesser is the speed of the motor and vice-versa. When 3-phase supply is given to the stator winding, a rotating magnetic field of constant magnitude is produced. This rotating field induces currents in the rotor by electromagnetic induction.
With what material the rotor of 3 phase motor is made?
Rotor. The rotor, mounted on a shaft, is a hollow laminated core having slots on its outer periphery.
In which motor both stator and rotor winding are connected to voltage source?
In d.c. motor where both stator winding (i.e., field winding) and the rotor winding (i.e., armature winding) are connected to a voltage source.
What are the major types of Rotor Winding placed in 3 phase induction motor?
The winding placed in these slots (called rotor winding) may be one of the following two type :
(1) Squirrel cage type
(ii) Wound type
Differentiate between Squirrel cage type rotor and Wound type rotor?
Squirrel cage rotor consists of a laminated cylindrical core having parallel slots on its outer periphery. One copper or aluminum bar is placed in each slot. All these bars are joined at each end by metal rings called end rings. This forms a permanently short-circuited winding which is indestructible. The entire construction (bars and end rings) resembles a. squirrel cage and hence the name. The rotor is not connected electrically to the supply but has current induced in it by transformer action from the stator.
While wound rotor consists of a laminated cylindrical core and carries a 3-phase winding, similar to the one on the stator.
How rotor windings are connected to supply and why wound rotor type is preferred to squirrel cage type induction motor?
The rotor winding is uniformly distributed in the slots and is usually star-connected. The open ends of the rotor winding are brought out and joined to three insulated slip rings mounted on the rotor shaft with one brush resting on each slip ring. The three brushes are connected to a 3-phase star-connected rheostat. At starting, the external resistances are included in the rotor circuit to give a large starting torque. These resistances are gradually reduced to zero as the motor runs up to speed. The external resistances are used during starting period only. When the motor attains normal speed, the three brushes are short-circuited so that wound rotor runs like a squirrel cage rotor.
What do you mean by squirrel cage induction motors?
Those induction motors which employ squirrel cage rotor are called squirrel cage induction motors. Most of 3-phase induction motors use squirrel cage rotor as it has a remarkably simple and robust construction enabling it to operate in the most adverse circumstances.
Why the starting torque of Squirrel cage induction motor is LOW?
It suffers from the disadvantage of a low starting torque. It is because the rotor bars are permanently short-circuited and it is not possible to add any external resistance to the rotor circuit to have a large starting torque.
How Rotating Magnetic Field is produced in three phase induction motor?
When a 3-phase winding is energized from a 3-phase supply, a rotating magnetic field is produced. This field is such that its poles do not remain in a fixed position on the stator but go on shifting their positions around the stator. For this reason, it is called a rotating field.
What is Synchronous speed?
speed at which the revolving flux rotates is called synchronous speed (Ns). its value depends upon the number of poles and the supply frequency.
Since revolutions per second is equal to the revolutions per minute (Ns) divided by 60 and the number of cycles per second is the frequency f, NS=(120F)/P
Magnetic flux is said to rotate at synchronous speed why?
The speed of the rotating magnetic field is the same as the speed of the alternator that is supplying power to the motor if the two have the same number of poles. Hence the magnetic flux is said to rotate at synchronous speed.
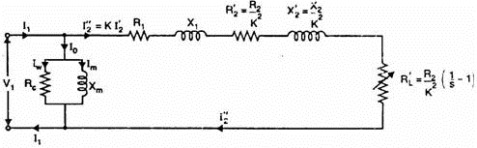
Please draw the Equivalent Circuit of Induction Motor
in case of a transformer, the approximate equivalent circuit of an induction motor is obtained by shifting the shunt branch (Rc Xm) to the input terminals . This step has been taken on the assumption that voltage drop in R1 and X1 is small and the terminal voltage V1 does not appreciably differ from the induced voltage E1. Fig shows the approximate equivalent circuit per phase of an induction motor where all values have been referred to primary (i.e., stator).
Why the exciting current of induction motor is so high as compared to the power transformer?
In a transformer, the windings are concentrated whereas in an induction motor, the windings are distributed. This affects the transformation ratio.
The induction motor is fundamentally a transformer in which the stator is the primary and the rotor is short-circuited secondary. At starting, the voltage induced in the induction motor rotor is maximum ( s = 1). Since the rotor impedance is low, the rotor current is excessively large. This large rotor current is reflected in the stator because of transformer action. This results in high starting current (4 to 1O times the full-load current) in the stator at low power factor and consequently the value of starting torque is low. Because of the short duration, this value of large current does not harm the motor if the motor accelerates normally.
Large starting current will produce large line-voltage drop. This will adversely affect the operation of other electrical equipment connected to the same lines. Therefore, it is desirable and necessary to reduce the magnitude of stator current at starting and several methods are available for this purpose.
The common methods used to start induction motors are:(i)Direct-on-line starting(ii) Stator resistance starting(iii)Autotransformer starting(iv) Star-delta starting(v)Rotor resistance startingHow slip ring motors are started?
Slip ring motors are invariably started by rotor resistance starting.What is Direct-on-line starting of induction motor?
This method of starting in just what the name implies the motor is started by connecting it directly to 3-phase supply. The impedance of the motor at standstill is relatively low and when it is directly connected to the supply system, the starting current will be high (4 to 1O times the full-load current) and at a low power factor. Consequently, this method of starting is suitable for relatively small (up to 7.5 kW) machines.
Does starting torque is higher than full load torque?
No, starting current is as large as five times the full-load current but starting torque is just equal to the full-load torque. Therefore, starting current is very high and the starting torque is comparatively low. If this large starting current flows for a long time, it may overheat the motor and damage the insulation.
What is Stator resistance starting method?
In this method, external resistances are connected in series with each phase of stator winding during starting. This causes voltage drop across the resistances so that voltage available across motor terminals is reduced and hence the starting current. The starting resistances are gradually cut out in steps (two or more steps) from the stator circuit as the motor picks up speed. When the motor attains rated speed, the resistances are completely cut out and full line voltage is applied to the rotor.
Why Stator resistance starting is not recommended?
This method suffers from two drawbacks. First, the reduced voltage applied to the motor during the starting period lowers the starting torque and hence increases the accelerating time. Secondly, a lot of power is wasted in the starting resistances. Therefore, this method is used for starting small motors only.
What is Autotransformer starting method?
This method also aims at connecting the induction motor to a reduced supply at starting and then connecting it to the full voltage as the motor picks up sufficient speed. Fig. shows the circuit arrangement for autotransformer starting.
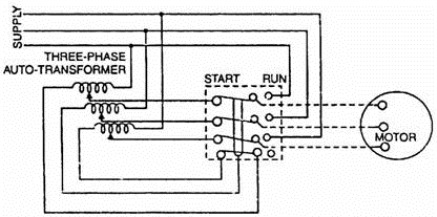
Autotransformer starting has several advantages like low power loss, low starting current and less radiated heat. For large machines (over 25 H.P.), this method of starting is often used. This method can be used for both star and delta connected motors.
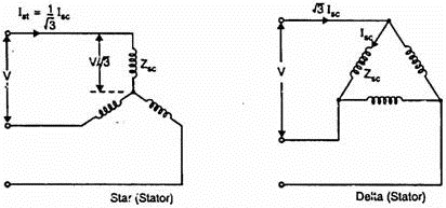
The stator winding of the motor is designed for delta operation and is connected in star during the starting period. When the machine is up to speed, the connections are changed to delta. The circuit arrangement for star-delta starting is shown below:
Slip-ring motors are invariably started by rotor resistance starting. In this method, a variable star-connected rheostat is connected in the rotor circuit through slip rings and full voltage is applied to the stator winding as shown in Fig.
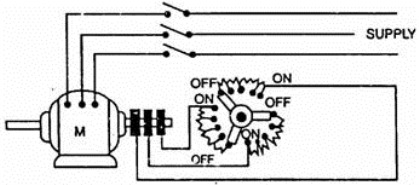
As the motor picks up speed, the handle of rheostat is gradually moved in clockwise direction and cuts out the external resistance in each phase of the rotor circuit. When the motor attains normal speed, the change-over switch is in the ON position and the whole external resistance is cut out from the rotor circuit.
(i) High starting torque with low starting current.
(ii) Smooth acceleration under heavy loads.
(iii) No abnormal heating during starting.
(iv) Good running characteristics after external rotor resistances are cut out. (v) Adjustable speed
(i) The initial and maintenance costs are greater than those of squirrel cage motors.
(ii) The speed regulation is poor when run with resistance in the rotor circuit
The nameplate of a 3-phase induction motor provides the following information:
(i) Horsepower
(ii) Line voltage
(iii) Line current
(iv) Speed
(v) Frequency
(vi) Temperature rise
The horsepower rating is the mechanical output of the motor when it is operated at rated line voltage, rated frequency and rated speed. Under these conditions, the line current is that specified on the nameplate and the temperature rise does not exceed that specified.
The speed given on the nameplate is the actual speed of the motor at rated full- load; it is not the synchronous speed.
In order to provide high starting torque at low starting current, double-cage construction is used.
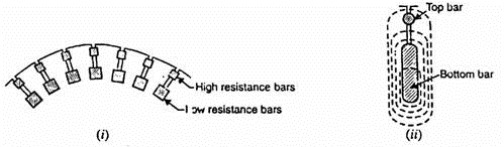
As the name suggests, the rotor of this motor has two squirrel-cage windings located one above the other.
The outer winding consists of bars of smaller cross-section short-circuited by end rings. Therefore, the resistance of this winding is high. Since the outer winding has relatively open slots and a poorer flux path around its bars so it has a low inductance. Thus the resistance of the outer squirrel-cage winding is high and its inductance is low.
The inner winding consists of bars of greater cross-section short-circuited by end rings. Therefore, the resistance of this winding is low. Since the bars of the inner winding are thoroughly buried in iron, it has a high inductance [See Fig. (8.35 (ii))]. Thus the resistance of the inner squirrel- cage winding is low and its inductance is high.
The speed at which the flux produced by 3-phase stator windings of induction motor rotates is called the synchronous speed of the motor. It is given by :
Ns = 120 f/p
where Ns= synchronous speed in r.p.m.
f = supply frequency in Hz
P = number of poles
A 3-phase induction motor has two windings viz stator winding supported by the stationary part of the machine and the rotor winding placed on the rotor. So far as the basic operation of the motor is concerned, it makes no difference which winding is located on the stator. The machine will function equally well with field producing winding as either the stationary or rotating element. Making the field winding stationary element eliminates the use of slip rings and brushes and, therefore, will result in a very trouble-free construction.
When three-phase stator winding is fed from 3-phase supply, a rotating magnetic field is set up which cuts the rotor conductors. Since the rotor circuit is closed, currents start flowing in the rotor conductors. Now, rotor conductors are carrying currents and are in the magnetic field. Therefore, mechanical force acts on the rotor, tending to move it in the same direction as the stator field. The fact that the rotor is urged to follow the stator field (i.e. rotor moves in the direction of stator field) can be explained by Lenz’s law. According to Lenz’s law, the direction of rotor currents will be such so as to oppose the cause producing them. Now, the cause producing the rotor currents is the relative speed between the rotating field and stationary rotor. Hence to reduce this relative speed, the rotor starts running in the same direction as the stator field and tries to catch it.
The rotor follows the stator field. In actual practice, rotor, can never reach the speed of stator field (i.e. synchronous speed). If it did, there would be no relative movement between the stator field and rotor conductors and, therefore, no torque to drive the motor. Hence 3-phase induction motor can never run at synchronous speed.
The air gap between the rotor and stator of a 3-phase induction motor is made as small as possible in order that :
(i) mutual flux may be produced with a minimum exciting current.
(it) leakage reactance are as small as possible.
The magnetizing current drawn by a 3-phase induction motor is very large (30-50% of full-load stator winding current) owing to the presence of air-gap between the stator and rotor
The rate at which the flux cuts the rotor conductors is directly proportional to the difference between the speed of rotating field (N s) and that of the rotor (N). If the rotor speed were to become equal to the speed of the rotating field, there would be no generated e.m.f. (and hence current) in the rotor conductors. Consequently, there would be no motor action. Thus it is the slip of the rotor (Ns – N r.p.m.) which causes e.m.f.s to be generated and currents to flow in the rotor conductors. This is precisely the principle of operation of 3-phase induction motor.
Essentially, there is little difference between the squirrel cage and wound rotors. The object of the latter is merely to bring out the ends of polyphase rotor winding to slip rings in order that additional external resistance may be connected in series to improve the starting torque.
Ans. The wound-rotor motors have the following advantages over the squirrel cage motors :
(i) High starting torque and low starting current.
(ii) Smooth acceleration under heavy load.
(iii) No abnormal heating during starting.
(iv) Good running characteristics after rotor resistance is cut out.
(v) Adjusting speed.
The wound-rotor motors have the following disadvantages as compared to squirrel cage motors:
(i) The initial and maintenance costs are greater than that of squirrel cage motors.
(ii) Poor speed regulation when run with resistance in the rotor circuit.
When this type of rotor first appeared, the common squirrel was a frequent house pet. The usual cage that housed him contained a rotating wheel that the animal could enter. This wheel afforded exercise and amusement to the pet. Since the rotor resembled squirrel’s exercise cage. it was named squirrel cage rotor.
Because of air-gap, the reluctance of the magnetic circuit of 3-phase induction motor is very high. Consequently, the current drawn by the motor on no load is largely magnetizing current; the no load current lagging the applied voltage by a large angle. For this reason, the p.f. of a lightly loaded 3-phase induction motor is very low.
A 3-phase induction motor draws a large magnetizing current because of high reluctance of the magnetic circuit; air-gap being the main reason. As load is added, the active component of current increases, resulting in higher power factor. However,because of the large value of magnetizing current, which is present regardless of load, the p.f. of 3-phase induction motor even at full-load seldom exceeds 0.85.
It is a usual practice to use the rotor of a squirrel cage motor with skewed slots i.e. slots that are not parallel to the shaft axis. This arrangement offers the following advantages :
(i) It reduces motor noise and vibration.
(ii) It increases the starting torque and reduces the starting current.
(iii) It increases the rotor resistance due Ix increased length of rotor bars.
When a high starting torque is required, a squirrel cage machine with specially designed rotor can be used without much sacrifice of efficiency but with some reduction of rated output. This can be achieved by either of the following two ways
(i) The rotor bars can be made very deep so that owing to skin effect, their resistance will be high at starting when the rotor frequency is equal to the supply frequency.
(ii) By using double squirrel cage rotor
The maximum torque of a squirrel cage induction motor is also called pull-out torque because of the way the motor reacts to an overload. After the maximum torque point (which is three to four times the full-load torque), the decrease in rotor* p.f. is greater than the increase in rotor current resulting in a decreasing torque and the motor quickly comes to stop.
It is generally experienced that a lathe will stall on a heavy cut. The machine will slow down as its cutting load is increased until suddenly it will stall and hum or growl loudly. This condition will persist until the load is removed or a fuse blows.
(i) When a 3-phase induction motor is in normal operation, the rotor frequency f ‘= s f where f is the supply frequency) is low and so is the rotor reactance. The current that flows is then largely limited by rotor resistance rather than reactance.
(ii) When the rotor is stationary (i.e. at standstill), s = 1. This means that rotor sees the full‑
line frequency (i.e. f’ = f) and its reactance is dominant compared to its resistance.
This is explained as under :
(i) At no load, the rotor speed is maximum. The frequency and hence the rotor core loss is practically zero. However, the friction and windage losses are maximum.
(ii) When the load is increased, the rotor speed decreases and hence rotor frequency increases. Consequently, the rotor core loss increases while friction and Windage losses decrease.
It is found that at all loads, the rotor core loss plus friction and windage losses remain nearly constant.
Ans. The induction motor is fundamentally a transformer in which the stator is the primary and the rotor is a short-circuited secondary. This is evident, particularly when the rotor is stationary. The rotor current establishes a flux which opposes and, therefore, tends to weaken the stator flux. This causes more current to flow in the stator winding just as as increase in secondary current in a transformer causes a corresponding increase in primary current. Very often the analysis of an induction motor is made on the same lines as the transformer with the modification that short-circuited secondary is considered rotating.
The essential differences between a 3-phase induction motor and a power transformer are as under :
(1) Unlike that of a transformer, the magnetic circuit of a 3-phase induction motor has an air-gap. This increases the reluctance of the magnetic circuit of the motor to a great extent. Consequently, the magnetizing current drawn by an induction motor is much more than that of a power transformer.
(ii) The windings of a power transformer are cylindrical whereas those of induction motor are distributed. This affects the turn ratio.
(iii) In a 3-phase induction motor, electrical energy is converted into mechanical energy. However, in a transformer, electrical energy is transferred from one circuit to another, usually with a change in voltage level.
(iv) A transformer is a static device and, therefore, friction and windage losses are absent. Howev- r, 3-phase induction motor is a rotating machine and is attended by friction and windage losses. For this reason, the efficiency of a transformer is more than that of an induction motor.
The advantage of a double-squirrel cage motor is that it provides high starting torque and low starting current.
A double-squirrel cage motor has two rotor windings, one inside the other. impedance of the outer winding is less than that of the inner winding, resulting in a large proportion of current flowing in the outer high-resistance winding. This provides good starting torque.
As the motor accelerates, the rotor frequency decreases, thereby lowering the reactance of inner winding, allowing it to carry a largy proportion of the total current. At the normal operating speed, the rotor frequency is so low that nearly all the rotor current flows in the low-resistance inner cage, resulting in high efficiency and good speed regulation.
Ans. The formula for the synchronous speed of a 3-phase induction motor is given by : Ns =120f /P
It is clear that supply frequency and the number of poles are the only variable factors determining the synchronous speed. A variation of frequency is impossible because motor is connected to commercial supply which has a fixed frequency. Therefore, speed of a squirrel cage induction motor can be changed by varying the number of poles. Multispeed squirrel cage motors are provided with stator windings that can be reconnected to form different number of poles.
Related Articles :
Engineering Tutorial Keywords:
- 3 phase induction motor questions and answers
- 3 phase induction motor viva questions
- viva questions on induction motor
- Viva questions on 3 phase induction motor
- 3 phase induction motor interview questions
- induction motor interview question
- interview questions on three phase induction motor
- interview questions on 3 phase induction motor
- Interview question on induction
- interview question on induction motor