Please Name some Single-phase induction motors?
(i) split-phase type
(ii) capacitor type
(iii) shaded-pole type
Please name two types of Repulsion motors?
(i) Repulsion-start induction-run motor
(ii) Repulsion-induction motor
What are different types of single phase Synchronous motors?
(i) Reluctance motor
(ii) Hysteresis motor
How a single phase motor is similar to 3 phase motor?
A single phase induction motor is very similar to a 3-phase squirrel cage induction motor. It has
(i) a squirrel-cage rotor identical to a 3-phase motor
(ii) a single-phase winding on the stator
What is major difference between a 3-phase induction motor and a single-phase induction motor?
Unlike a 3-phase induction motor, a single-phase induction motor is not self- starting but requires some starting means.
Why single phase induction motor does not self starts?
The single-phase stator winding produces a magnetic field that pulsates in strength in a sinusoidal manner. The field polarity reverses after each half cycle but the field does not rotate. Consequently, the alternating flux cannot produce rotation in a stationary squirrel-cage rotor.
What is basic method to start single phase induction motor and why it is not preferred?
If the rotor of a single-phase motor is rotated in one direction by some mechanical means, it will continue to run in the direction of rotation. As a matter of fact, the rotor quickly accelerates until it reaches a speed slightly below the synchronous speed. Once the motor is running at this speed, it will continue to rotate even though single-phase current is flowing through the stator winding. This method of starting is generally not convenient for large motors. Nor can it be employed fur a motor located at some inaccessible spot.
Explain why single phase induction motor does not start in the light of Double-Field Revolving Theory?
The double-field revolving theory is proposed to explain this dilemma of no torque at start and yet torque once rotated. This theory is based on the fact that an alternating sinusoidal flux can be represented by two revolving fluxes, each equal to one-half of the maximum value of alternating flux (i.e., m/2) and each rotating at synchronous speed in opposite directions.
Therefore, an alternating field can be replaced by two relating fields of half its amplitude rotating in opposite directions at synchronous speed. Note that the resultant vector of two revolving flux vectors is a stationary vector that oscillates in length with time along X-axis.
What is the position of rotor at standstill?
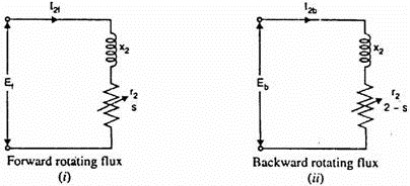
Consider the case that the rotor is stationary and the stator winding is connected to a single-phase supply. The alternating flux produced by the stator winding can be presented as the sum of two rotating fluxes 1 and 2, each equal to one half of the maximum value of alternating flux and each rotating at synchronous speed (Ns = 120 f/P) in opposite directions.
At standstill, these two torques are equal and opposite and the net torque developed is zero. Therefore, single-phase induction motor is not self-starting.
What is the value of slip at standstill?
Note that each rotating field tends to drive the rotor in the direction in which the field rotates. Thus the point of zero slip for one field corresponds to 200% slip for the other . The value of 100% slip (standstill condition) is the same for both the fields.
Explain motor action from standstill to running condition?
At standstill, s = 1 so that impedances of the two circuits are equal. Therefore, rotor currents are equal i.e., I2f = I2b. However, when the rotor rotates, the impedances of the two rotor circuits are unequal and the rotor current I2b is higher (and also at a lower power factor) than the rotor current I2f. Their m.m.f.s, which oppose the stator m.m.f.s, will result in a reduction of the backward rotating flux. Consequently, as speed increases, the forward flux increases, increasing the driving torque while the backward flux decreases, reducing the opposing torque. The motor-quickly accelerates to the final speed.
The single-phase induction motor is not self- starting and it is undesirable to resort to mechanical spinning of the shaft or pulling a belt to start it. To make a single-phase induction motor self-starting, we should somehow produce a revolving stator magnetic field. This may be achieved by converting a single-phase supply into two-phase supply through the use of an additional winding. When the motor attains sufficient speed, the starting means (i.e., additional winding) may be removed depending upon the type of the motor.
(i) Split-phase motors-started by two phase motor action through the use of an auxiliary or starting winding.
(ii) Capacitor motors-started by two-phase motor action through the use of an auxiliary winding and a capacitor.
(iii) Shaded-pole motors-started by the motion of the magnetic field produced by means of a shading coil around a portion of the pole structure.
As with a 3-phase supply, a 2-phase balanced supply also produces a rotating magnetic field of constant magnitude. With the exception of the shaded-pole motor, all single-phase induction motors are started as 2-phase machine. Once so started, the motor will continue to run on single-phase supply.
If the two windings arc displaced 90° electrical but produce fields that are not equal and that are not 90° apart in time, the resultant field is still rotating but is not constant in magnitude. One effect of this non uniform rotating field is the production of a torque that is non-uniform and that, therefore, causes noisy operation of the motor. Since 2-phase operation ceases once the motor is started, the operation of the motor then becomes smooth.
The stator of a split-phase induction motor is provided with an auxiliary or starting winding S in addition to the main or running winding M. The starting winding is located 90° electrical from the main winding and operates only during the brief period when the motor starts up. The two windings are so resigned that the starting winding S has a high resistance and relatively small reactance while the main winding M has relatively low resistance and large reactance as shown in the schematic connections in Fig. Consequently, the currents flowing in the two windings have reasonable phase difference c (25° to 30°) as shown in the phasor diagram in Fig.
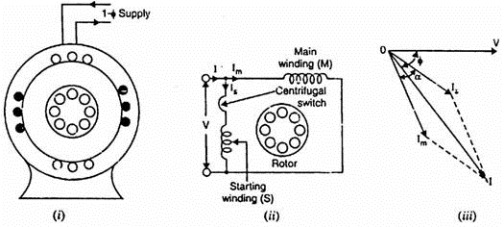
highly resistive, the currents Im and Is have a reasonable phase angle a (25° to 30°) between them as shown in Fig. Consequently, a weak revolving field approximating to that of a 2-phase machine is produced which starts the motor. where k is a constant whose magnitude depends upon the design of the motor.
The spinning torque is 15 to 2 times the full-loud torque mid (lie starting current is 6 to 8 times the full-load current.
Due to their low cost, split-phase induction motors are most popular single- phase motors in the market
Since the starting winding is made of fine wire, the current density is high and the winding heats up quickly. If the starting period exceeds 5 seconds, the winding may burn out unless the motor is protected by built-in-thermal relay. This motor is, therefore, suitable where starting periods are not frequent
An important characteristic of these motors is that they are essentially constant-speed motors. The speed variation is 2-5% from no-load to full- load
These motors are suitable where a moderate starting torque is required and where starting periods are infrequent e.g., to drive:
(a) fans
(b) washing machines
(c) oil burners
(d) small machine tools etc.
The power rating of such motors generally lies between 60 W and 250 W.